- Учителю
- Урок Координатно-векторный метод решения стереометрометрических задач
Урок Координатно-векторный метод решения стереометрометрических задач
КУРАГИНСКАЯ СОШ № 7
</<br>
РЕШЕНИЕ ЗАДАЧ ПО СТЕРЕОМЕТРИИ
КООРДИНАТНО- ВЕКТОРНЫМ МЕТОДОМ
УЧИТЕЛЬ МАТЕМАТИКИ
ЧЕРВОНЕНКО ТАМАРА ЯКОВЛЕВНА
П. КУРАГИНО 2016 г.
Алгебра - не что иное как записанная
в символах геометрия,
а геометрия - это просто алгебра,
воплощенная в фигурах.
Софий Жермен (1776-1831)
Большую роль в развитии геометрии сыграло применение алгебры к изучению свойств геометрических фигур, разросшееся в самостоятельную науку- аналитическую геометрию. Возникновение аналитической геометрии связано с открытием метода координат, являющегося основным методом. Метод координат - весьма эффективный и универсальный способ нахождения любых углов или расстояний между стереометрическими объектами в пространстве. Рене Декарт является одним из создателей аналитической геометрии . Предложенная им система получила его имя. В геометрии применяются различные методы решения задач. В своей работе я показала решение одной из задач тремя методами. Координатный метод решения задач на сегодняшний день самый мощный и позволяет решить почти все виды математических и не только задач.
АЛГОРИТМ ПРИМЕНЕНИЯ МЕТОДА КООРДИНАТ К РЕШЕНИЮ ГЕОМЕТРИЧЕСКИХ ЗАЧАЧ СВОДИТСЯ К СЛЕДУЮЩЕМУ
1. Выбираем в пространстве систему координат из соображений удобства выражения координат и наглядности изображения.
2. Находим координаты необходимых для нас точек.
3. Решаем задачу, используя основные задачи метода координат.
4. Переходим от аналитических соотношений к геометрическим.
I.Основные формулы:
1.Расстояние между точками А(![]()
![]() ,
,
![]()
![]() ),В
),В![]()
![]() ,
,
![]()
![]() )
равно
)
равно ![]()
![]() =
=![]()
![]() .
.
2.Угол между плоскостями. Если β-угол между плоскостями,
заданными уравнениями ![]()
![]() х+
х+![]()
![]() z+
z+![]()
![]() =0 и
=0 и ![]()
![]() х+
х+![]()
![]() z+
z+![]()
![]() =0, то
=0, то
 .
.
3.Расстояние от точки до плоскости. Если ρ- расстояние от
точки ![]()
![]() (
(![]()
![]() ,
,
![]()
![]() ),
до плоскости
),
до плоскости ![]()
![]() х+
х+![]()
![]() z+D
=0,то
z+D
=0,то
ρ=![]()
![]() .
.
4.Уравнение плоскости, проходящей через три заданные
точки![]()
![]() (
(![]()
![]() ,
,
![]()
![]() ),
),![]()
![]() (
(![]()
![]() ,
,
![]()
![]() ),
),![]()
![]() (
(![]()
![]() ,
,
![]()
![]() ),
в координатной форме:
),
в координатной форме:
 =0;
=0;
5. Если отрезок, концами которого служат точки
А(![]()
![]() ,
,
![]()
![]() ),В
),В![]()
![]() ,
,
![]()
![]() )
разделен точкой С(х, у,
)
разделен точкой С(х, у,![]()
![]() )
в отношении λ, то координаты точки С определяются по формулам
)
в отношении λ, то координаты точки С определяются по формулам
Х = ![]()
![]() ; у=
; у=![]()
![]() ; z=
; z=![]()
![]() .
.
Расстояние между скрещивающимися прямыми
Задание 14 (вариант 13 ЕГЭ, Ф. Ф. Лысенко) [5]
В кубе ABCDA1B1C1D1, ребро которого равно 4, точка M является серединой отрезка BC1.
а) Постройте сечение куба плоскостью, проходящей через прямую АМ, параллельную прямой А1В.
б) Найдите расстояние между прямыми А1В и АМ
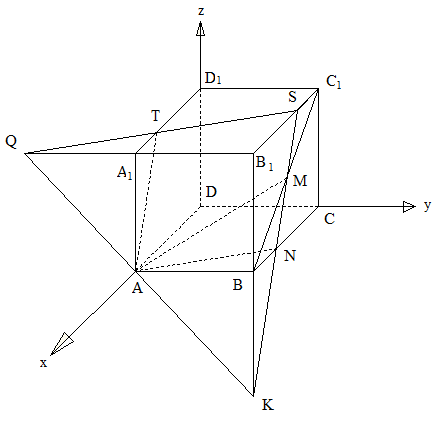
а) В плоскости грани АА1В1В через точку А проведем прямую, параллельную А1В. Q и K- точки пересечения этой прямой соответственно с прямыми А1В1 и ВВ1. Прямая КМ пересекает ребро ВС в точке N, а ребро B1C1 - в точке S. Отрезок SQ пересекает ребро
A1 D1 в точке Т.
Четырехугольник ATSN образует искомое сечение, так как все его вершины лежат в плоскости QSK, которая проходит через АМ и прямую АК, параллельную А1В и, следовательно, (QSK)││ А1В.
б) Введем систему координат. Ребро куба равно 4. Значит координаты точек:
А(4;0;0); М(2;4;2); К(4;4;-4); А1(4;0;4); В(4;4;0)
АМ лежит в плоскости сечения, которое параллельно прямой А1В. Значит за расстояние между прямыми А1В и АМ можно взять расстояние от любой точки, лежащей на А1В до плоскости сечения. Составим уравнение плоскости АМК: А(4;0;0); М(2;4;2); К(4;4;-4)
Уравнение плоскости ax+by+cz+d=0
Подставим координаты точек А, М и К в общее уравнение плоскости.
→
Отсюда уравнение плоскости имеет вид
x │
3x+y+z-12=0 Отсюда {3;1;1} нормальный вектор плоскости.
Найдем расстояние
(А1В, АМ)= == (Формула расстояния от точки до плоскости) [2]
Расстояние от точки до плоскости
(Работа ЕГЭ, математика 2013)
Задача
В правильной треугольной призме АВСА1В1С1 стороны основания равны 2, боковые ребра равны 1, точка D - середина ребра СС1. Найдите расстояние от вершины С до плоскости ADB1
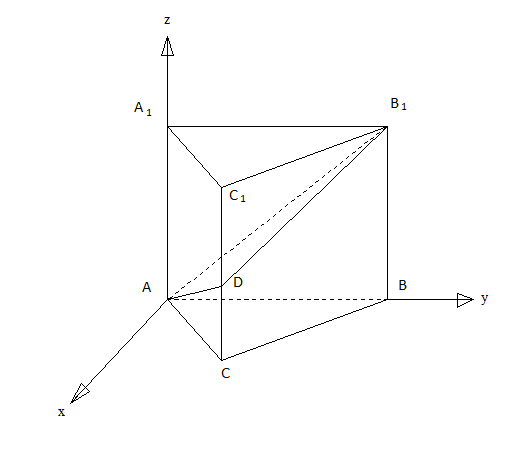
Введем систему координат. Тогда
А (0;0;0) В (0;2;1)
D (;1;0,5) С (;1;0)
Уравнение плоскости, проходящей через 3 заданные точки А (0;0;0), D (;1;0,5) и
В (0;2;1) в координатной форме имеет вид: = 0 [3]
= = 0
Или x+2z-x-y=0
-y+2z=0
y-2z=0 в этом уравнении
ax+bx+cz+d=0
a=d=0
b=
c=-2
{0; нормальный вектор плоскости.
Расстояние находим по формуле из учебника Л. С. Атанасян «Геометрия 10-11» [2]
ρ=(C, ADB1) = , где C (;C (;
ρ=(C, ADB1) = = = = =
Расстояние от точки до плоскости
Задание С2 (ЕГЭ 2013, И. В. Ященко) [6]
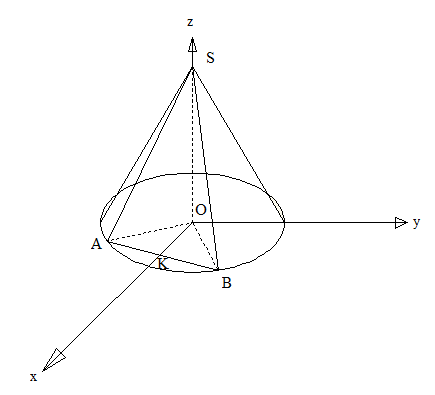
Радиус основания конуса равен 9, а его высота 12. Плоскость сечения конуса содержит его вершину и хорду основания, длина которой равна 10. Найдите расстояние от центра основания конуса до плоскости сечения.
Эту задачу я решил тремя вариантами чтобы сравнить возможности координатно-векторного метода с другими.
Вариант 1.
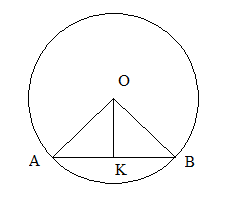
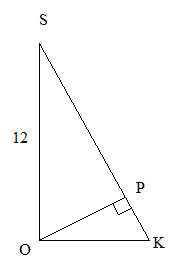
ОК====2;
SK===10
=10*SP
SP===;
ОР2=SP*PK=
ОР=
Вариант2
Рассмотрим объем пирамиды OASB
VOASB=SAOB*OS=**10*2*12=
SOASB=SASB*OP
SASB*OP=*OP=
OP=
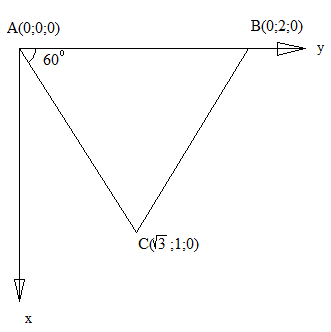
Вариант 3 (координатно-векторный метод)
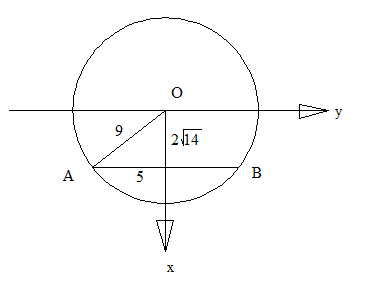
Введем систему координат
А(-5;2;0); В(5; 2
Найдем уравнение плоскости ABS. Общее уравнение имеет вид: ax+by+cz+d=0
Следовательно уравнение плоскости: 0x -
+-1=0
O(0;0;0) найдем расстояние [2]
ρ(0;ABS)=
Угол между плоскостями
Задание 14 (ЕГЭ 2016, Ф.Ф. Лысенко, вариант 31) [5]
В правильной шестиугольной призме ABCDEFA1B1C1D1E1F1 все рёбра равны 4.
а) Докажите что угол между прямыми AD1 и DC1 равен 90о;
б) Найдите угол между плоскостями FAC1 и AA1D
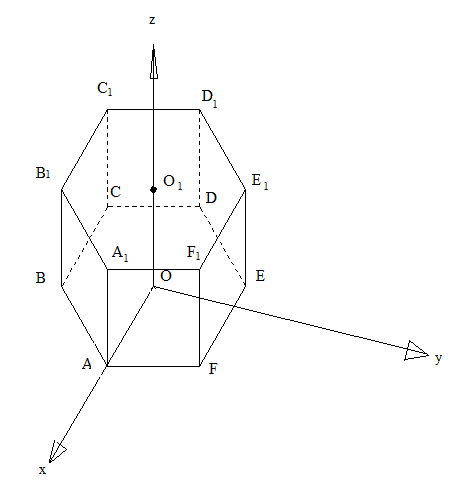
Введем систему координат, тогда точки будут иметь координаты:
A(4;0;0); D(-4;0;0); D1(-4;0;4); C1(-2;-2;4)
1{-8;0;4}; 1{2;2;4}
1*1=-16+16=0
Скалярное произведение векторов равно 0, следовательно вектора перпендикулярны
AD1 ⊥ DC1, а значит угол равен 90о
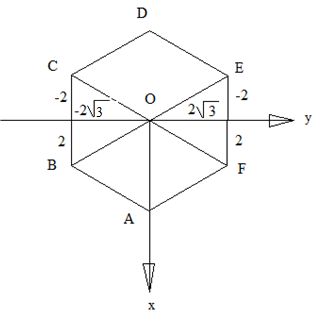
б) Найдем угол между плоскостями FAC1 и AA1D
Составим уравнения плоскостей ax+by+cz+d=0 - общее уравнение плоскости
F(2;2;0); A(4;0;0); C1(-2;-2;4)
2a+2b+0c+d=0
4a +d=0
-2a-2b+4c+d=0
1{;нормальный вектор плоскости FAC1.
Составим уравнение плоскости AA1D [2]
A(4;0;0); A1(4;0;4); D(-4;0;0)
a=d=0; с=0; b-любое, пусть b=1. Уравнение y=0.
2{0;1;0}-нормальный вектор плоскости AA1D
====
Угол =arccos
Угол между прямыми
Задание 14 ( Вариант 7 ЕГЭ, Ф.Ф. Лысенко) [5]
В основании четырехугольной пирамиды SABCD лежит прямоугольник со сторонами AB=8, BC=15. Боковые ребра SB=6, SC=3, SA=2.
а) Докажите, что SB - высота пирамиды.
б) Найдите угол между SD и AC.
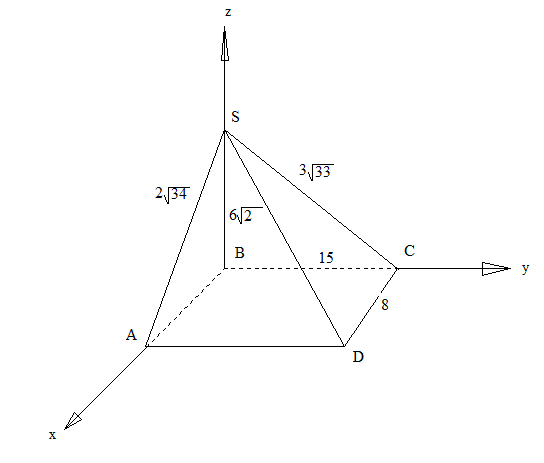
SB плоскости ABCD т.к. SB BC и SB AB
9*33=225+72 верно
136=64+72 верно
Следовательно SB-высота.
б) Введем систему координат A(8;0;0); С(0;15;0); D(8;15;0); S(0;0; 6)
{-8;15;0}, {8;15;- 6}
== [2]
Отсюда =
Площадь сечения.
Задание 14. (Вариант 20 Лысенко 2016) [5]
Сторона основания правильной шестиугольной пирамиды SABCDEF равна 6. Боковое ребро наклонено к основанию под углом 60˚. Через меньшую диагональ основания АС проведено сечение, которое пересекает высоту пирамиды в точке, удаленной от основания на расстояние .
а) Докажите что это сечение перпендикулярно противоположному к АС боковому ребру пирамиды SE.
б) Найдите площадь сечения.
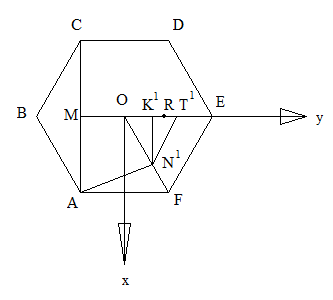
Введем систему координат: ось ОХ т О и середина AF, ось OY-OE
Построим сечение: АС разделим пополам - точка М.
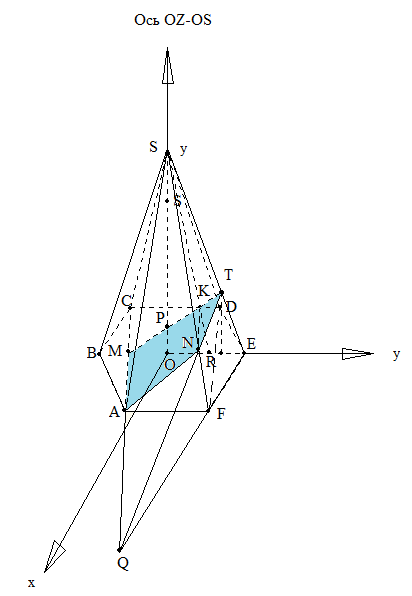
На OS отложим ОР= и соединим МР до пересечения с SE в точке Т, точка К - лежит на SR, где R середина ОЕ. Продолжим АС и FE точка Q, соединим Q c T, точка N точка пересечения QT и SF.
Координаты точек: S(0;0;6); Е(0;6;0); Р(0;0;); М(0;-3;0). Тогда {0;-3;-}
{0;-6;6}, отсюда *=0+18-18=0, то есть .
А(3;-3;0); C(-3;-3;0); {-6;0;0}; *=0+0+0=0
перпендикулярно двум прямым АС и РМ, которые пересекаются в М и лежат в плоскости сечения. Отсюда перпендикулярно плоскости сечения, что и требовалось доказать.
б) Начертим треугольник OSE. В этом треугольнике SEO=60˚; OS=6; ОЕ=6, значит PS=5, S=30˚; ST=7,5; Т1Е=2,25
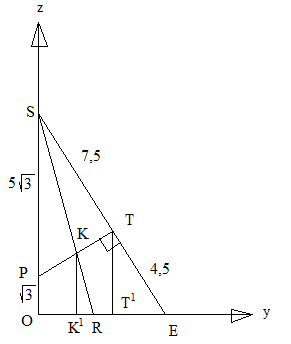
Найдем координаты точки К как точки пересечения прямой МР и SR, PMO=30˚; tgPMO=; отсюда уравнение прямой МР→z=; tgORS==2;
Прямая SR→z=-2y+6
; =; +=; =;
у=; у=; ордината точки К есть
Площадь сечения найдем как площадь проекции МК1Т1N1A, что представляет собой трапецию МК1N1А и треугольник К1Т1N1, тогда абсцисса точки К1 будет
S трапеции=*h; SМК1N1А=*МК1=;
S∆К1Т1N1=*
½ S проекции сечения=+=
; Тогда площадь половины сечения будет:
:=; где =cos30˚; Откуда площадь всего сечения S=.
Мною рассмотрены ряд разнообразных задач по стереометрии как по нахождению разных величин, так и различных стереометрических тел: призмы, пирамиды, конус. Я просмотрела весь задачник по ЕГЭ 2016 года под редакцией Ф.Ф.Лысенко и постаралась взять из сборника различные задачи. Их решение поможет при подготовке и выполнении ЕГЭ профильного уровня учащимся 11 класса
ИСТОЧНИКИ ИНФОРМАЦИИ
1.Агачев П.Е. Курс высшей математики. Для заочных техникумов.1970, М:, Высшая школа, 539с.
2. Атанасян Л.С., Бутузов В.Ф..Геометрия 10-11,2014,М.: Просвещение,256с.
3. Выгодский М.Я. Справочник по высшей математике. 1973. М:. Наука.,870с.
4..Глаголев Н.А. Элементарная геометрия: стереометрия для 10-11 кл. ср. шк. В 2 ч.-М.: просвещение-ч.2
5..Лысенко Ф.Ф. Математика. Подготовка к ЕГЭ-2016: учебно-методическое пособие.- Ростов-на Дону: Легион-М., 2015 .
6. Ященко И.В. Математика 2012 М.: Астрель 2012-(ФИПИ)
7. Интернет ресурсы:
http: //ru.wikipedia/org/wiki/pi