- Учителю
- Мобильная автоматизированная система ведения огня «Автотурель»
Мобильная автоматизированная система ведения огня «Автотурель»
13
Краснодарский край, г. Краснодар
Мобильная автоматизированная система ведения огня «Автотурель»
Научный руководитель: Тишина Анастасия Игоревна, учитель информатики и ИКТ, ФКГОУ Краснодарское ПКУ
Введение
Актуальность работы: расширение использования автоматических турелей и их совершенствование существенно снизит потери среди личного состава, для их работы не нужно непосредственное участие человека, а также повысит вероятность уничтожения противника, т.к. на работу автоматики не влияет человеческий фактор.
Цель работы: изучить автоматические системы ведения огня.
Задачи: провести исследование на платформе программного обеспечения 3D - моделирования и языка программирования, автоматических систем ведения огня, проанализировать историю создания, алгоритм работы системы, выявить основные достоинства и недостатки, на основе исследований построить модель мобильной автоматической турели.
Часть 1
Объектом исследования является процесс создания и анализа автоматизированной системы с помощью 3D - моделирования и языка программирования. С результатом роста количества военной техники, разнообразия и сложности автоматизированных систем значительно возросло. Система должна максимально эффективно вести цель, конвоирование, оборона укрепленных точек. [1] На принципе представлена турельная установка, созданная и усовершенствованная модель турели - установка для крепления пулемётов или малокалиберных автоматических пушек, обеспечивающая с помощью специальных систем и силовых приводов их наводку в горизонтальной и вертикальной плоскостях. Турели используются в стационарном варианте, а также на самолётах, танках, бронемашинах и кораблях, начиная с 1910-х годов. [2]
Основой конструкции обычно является поворотное кольцо, внутри которого и сидит наводчик - это снимает основную проблему более простых шкворневых установок, у которых наводка по горизонтали осуществляется вокруг оси, обычно проходящей через точку крепления оружия, что вынуждает стрелка самому перемещаться вокруг точки крепления. Кроме того в авиации</ турельные установки сделали возможным круговой обстрел, так как кабина самолёта сильно ограничивала перемещения стрелка в случае шкворневых установок.
В гражданском применении турель - устройство для наведения на цель установленных на неё механизмов
Различают:
-
открытые турели, когда наводчик и механизмы не защищены;
-
турели, частично закрытые тонкими металлическими листами;
-
закрытые (защищённые) турели.
Не смотря на все достоинства, приведённые выше, автоматические турели имеют ряд недостатков такие как: высокая стоимость, ненадёжность систем, стационарность и, как вследствие, узкая специализация. Проводя данное исследование, мы хотим устранить некоторые несовершенства, добавив мобильность. Установив турель на подвижную платформу, можно устранить стационарность турели.
Часть 2
В результате исследований, мы выявили основной принцип работы стационарной турели, описанный выше. Наша задача построить мобильную турель, способную патрулировать территорию, опорный пункт, а также конвоировать цель. Чтобы создать систему, способную охранять большую территорию, передвигаясь по ней, нам пришлось решить ряд проблем: обеспечить систему навигацией и обеспечить турель платформой
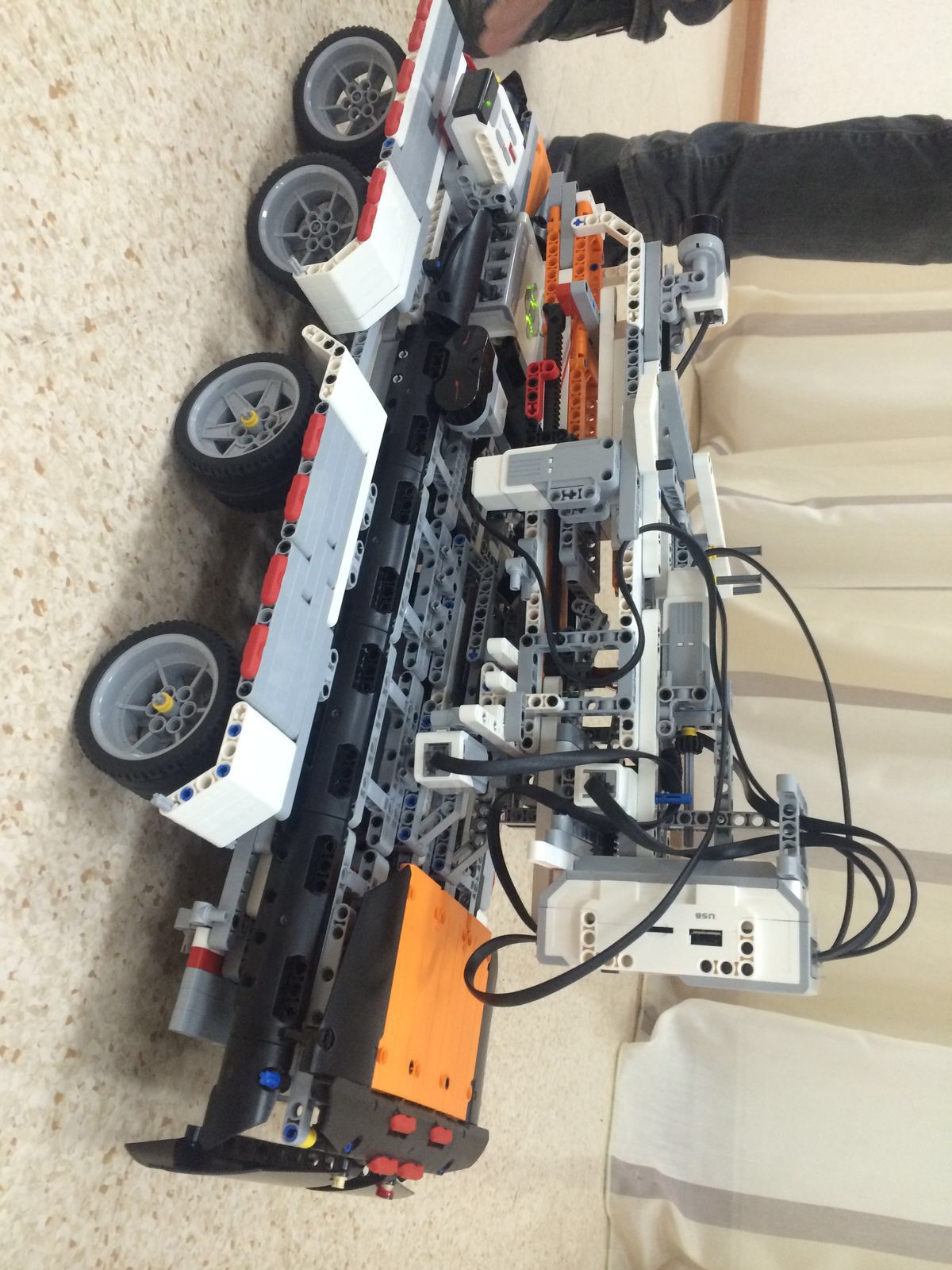
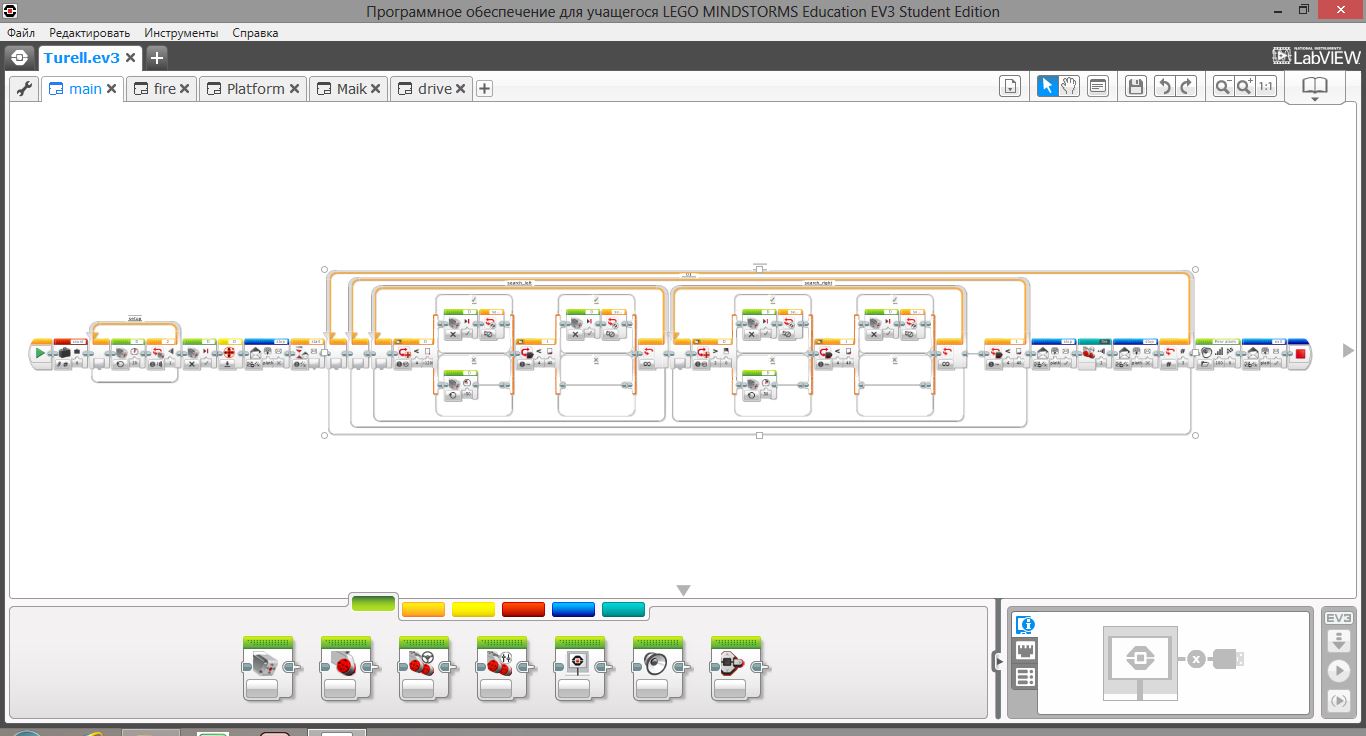
На основе исследований мы собрали Мобильную автоматизированную систему ведения огня «Автотурель» (Приложение 1). Боевая часть (Приложение 2) построена по типу «Арбалет» с магазином на 6 дисков. Боевую часть мы установили на восьмиколесную платформу 8 на 4 (Приложение 3). Также в ходе создания, нам пришлось собрать вспомогательную систему «Маяк». Потребность в ней возникла при разработке системы навигации «Автотурели». Боевая часть соединяется с платформой с использованием технологии «Bluetooth». Платформа координирует алгоритм с «Маяком» с помощью радиосвязи. Программное обеспечение состоит из 5-ти программ: функции «main» - управляет работой всей системы (Приложение 4), «drive» - корректирует траекторию движения платформы (Приложение 5), «fire» - отвечает за стрельбу и перезарядку (Приложение 6), «platform» - управляет ходовой частью платформы (Приложение 7) и «maik» - координирует работу «Маяка» и платформы.
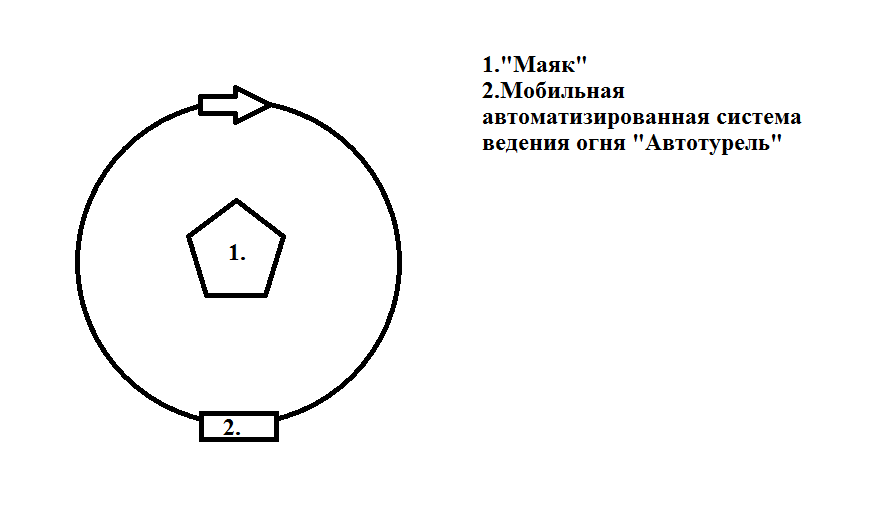
Принцип действия прост: сначала на «Маяке» вручную запускается функция «maik», затем на платформе и боевой части (также вручную) запускается одновременно функция «main». Турель начинает движение вокруг «Маяка» на заданном расстоянии, самостоятельно выбирая траекторию своего движения (Приложение 8). Во время движения, боевая часть осуществляет поиск целей на плоскости вне круга, ограниченного траекторией. При появлении цели, платформа останавливается, фиксируется. Функция «fire» дважды осуществляет зарядку орудия и производит выстрел. После второго выстрела, машина остаётся на месте, проверяет уничтожение противника и осуществляет поиск новых целей. Если ничего не было обнаружено, платформа возобновляет движение вокруг точки. Машина работает до полного расхода боекомплекта или заряда аккумулятора или до команды человека.
Особенности данной модели: система автономна, работает без вмешательства человека, восьмиколесная платформа обеспечивает высокую проходимость платформы, данная модель демонстрирует основные принципы работы современных систем, простая программа, автоматическая турель установлена на подвижную платформу, что значительно расширяет область применения автоматических турелей.
Заключение
В заключение хотелось бы сказать, что мы провели исследовательскую деятельность в области военной робототехники и программного обеспечения 3D - моделирование. Также мы изучили и исследовали понятие автоматизированной системы ведения огня, её историю создания, принцип работы алгоритма, достоинства и недостатки. В ходе исследования с помощью алгоритма программ был освещён путь устранения основного недостатка современных систем ведения огня - стационарность. На примере модели «Мобильная автоматизированная система ведения огня «Автотурель», мы проработали один из вариантов создания современных боевых многофункциональных турелей. Наша модель из конструктора «LEGO Mindstorm» которая была смоделирована с помощью программного обеспечения и уже может нести боевой патруль вокруг точки, вести огонь по появляющейся цели и уничтожать её.
Роботы быстро вошли в нашу жизнь. Уже можно точно сказать, что эта технология будет шире использоваться и в военной специальности. Такие типы роботов как беспилотные летательные аппараты, автоматические турели, самонаводящиеся ракеты, автоматизированные минёры и тому подобные системы уже широко используются в ВС ряда стран всего мира. Эти системы далеко не совершенны, узкоспециализированы, и ненадёжны. В своей работе, мы осветили одно из направлений военной робототехники и путь его совершенствования. Мы достигли поставленных нами в начале работы целей и задач: изучить автоматизированные турели, алгоритм их действия, предложить решение недостатка и построить на основе исследований и 3D - модели, свою модель мобильной турели. В дальнейшем мы собираемся совершенствовать нашу модель во многих направлениях: расширить круг применения (добавить возможность преодоления водных препятствий), доработать систему навигации, улучшить ходовые качества и т.п.
Список литературы
-
SIEMENS. Компоненты комплексных систем автоматизации. Каталог SIMATIC ST70. - 2005.
-
Бергер Г. Автоматизация посредством STEP 7 с использованием STL и SCL и программируемых контроллеров SIMATIC S7 300/400.
-
Минский М. Вычисления и автоматы. - М.: Мир, 1971.
Приложение 1
Мобильная автоматизированная система «Автотурель»
Приложение 2
3D-модель платформы
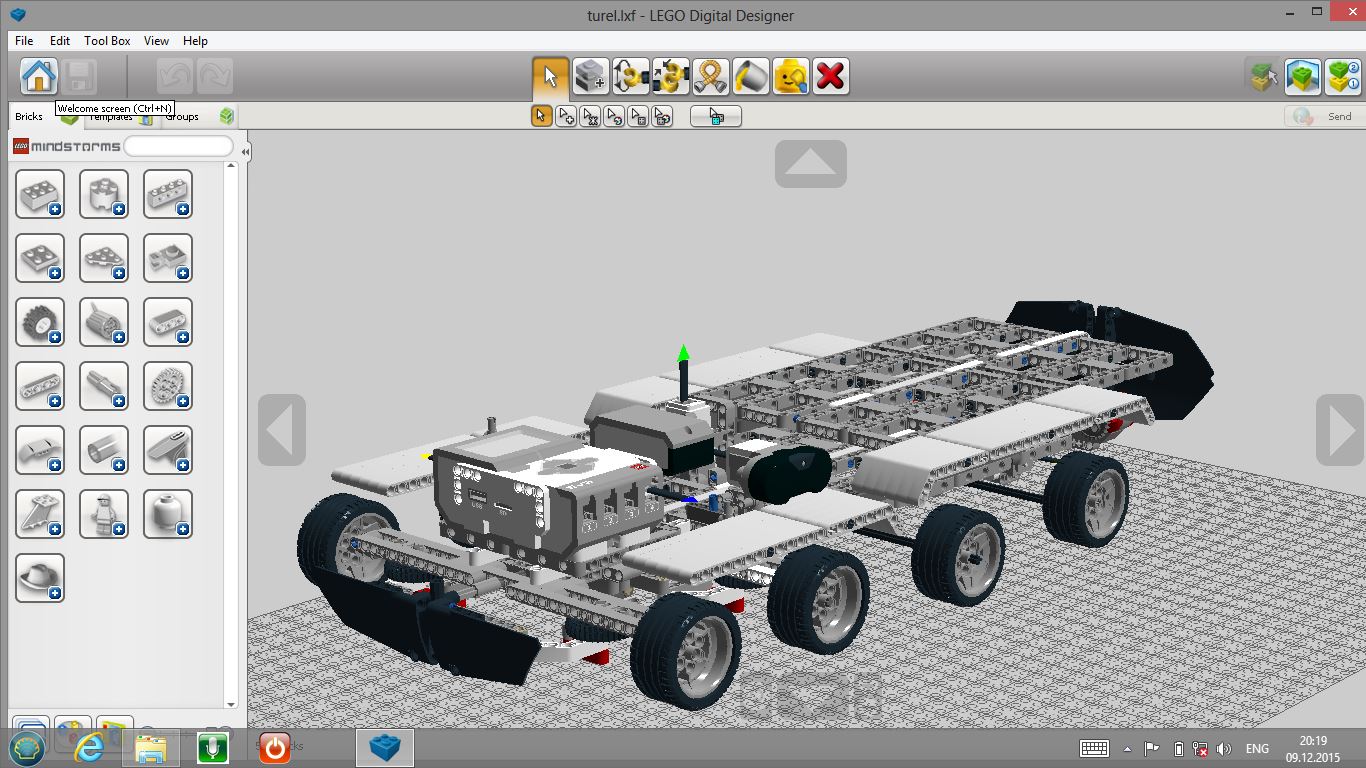
Приложение 3
3D-модель боевой части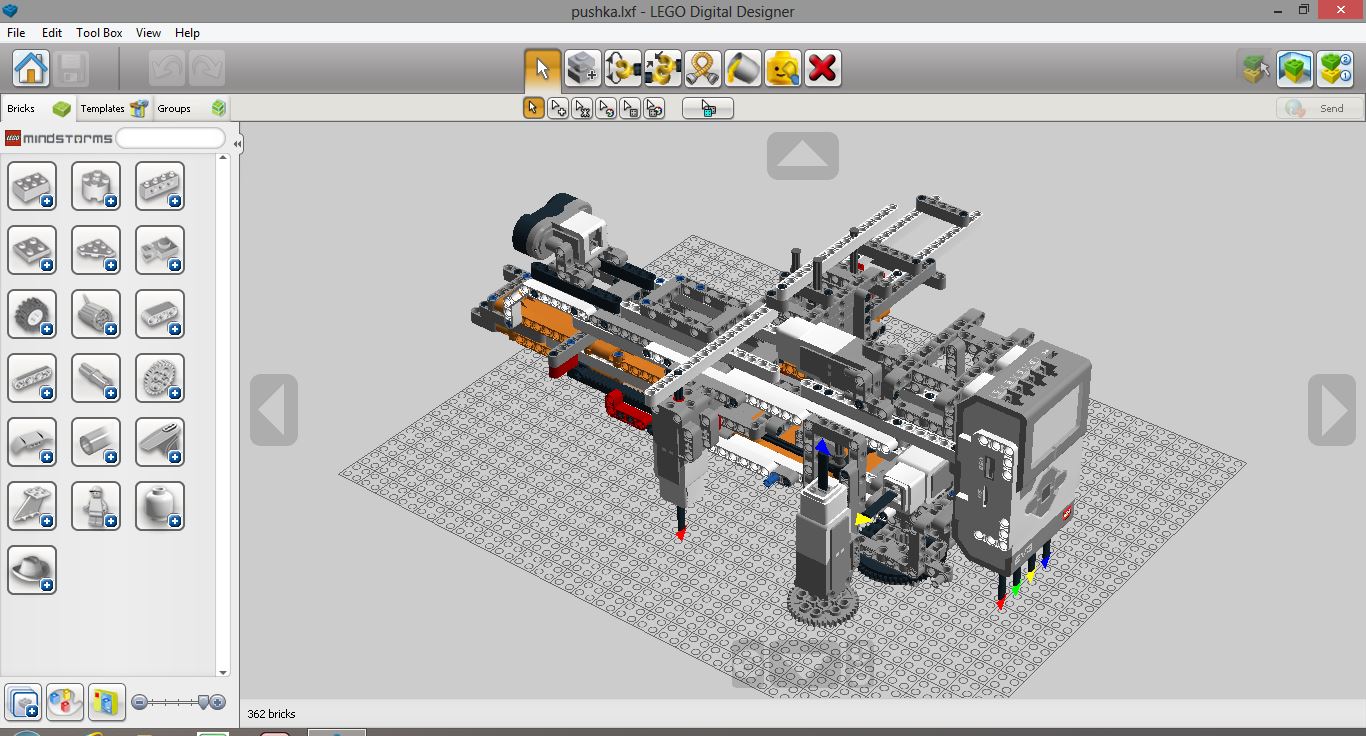
Приложение 4
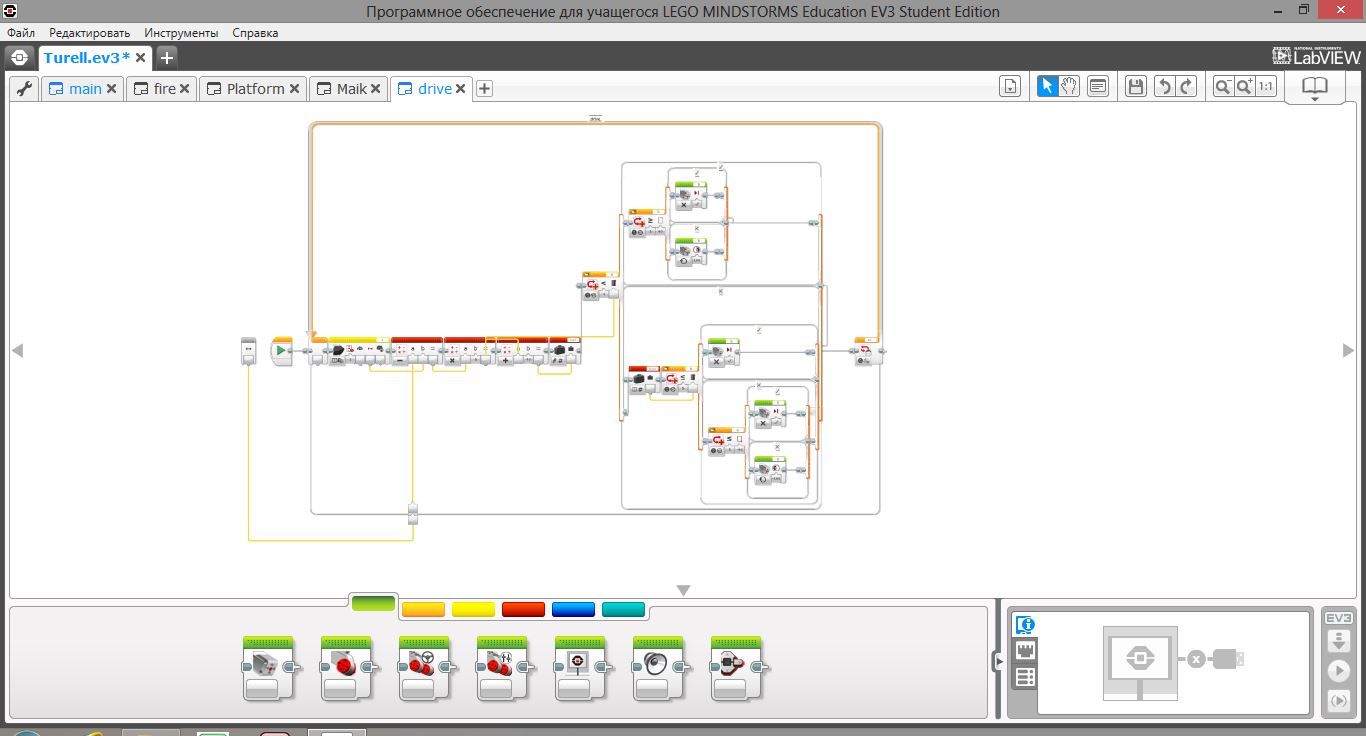
Приложение 5
Алгоритм функции «drive»
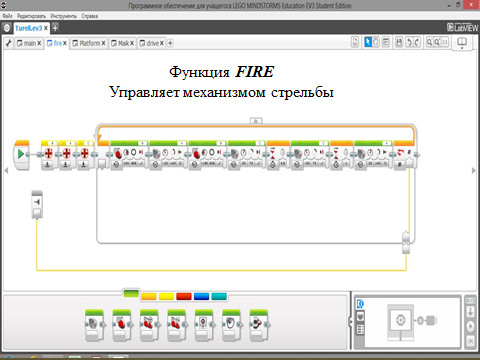
Приложение 6
Алгоритм функции «fire»
Приложение 7
Алгоритм функции «Platform»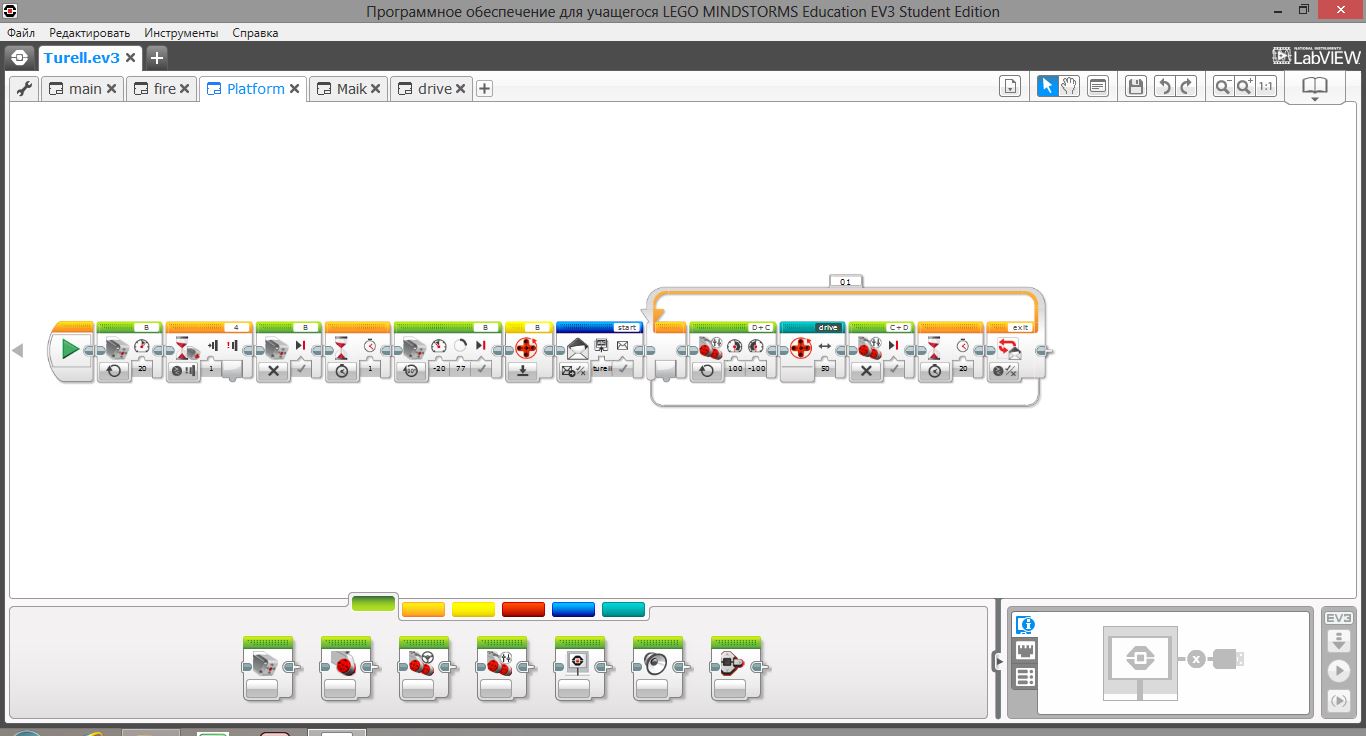
Приложение 8
Схема движение вокруг «Маяка